I love it ! Calibration Invariant Imaging.
Object classification through scattering media with deep learning on time resolved measurement by Guy Satat, Matthew Tancik, Otkrist Gupta, Barmak Heshmat, and Ramesh Raskar
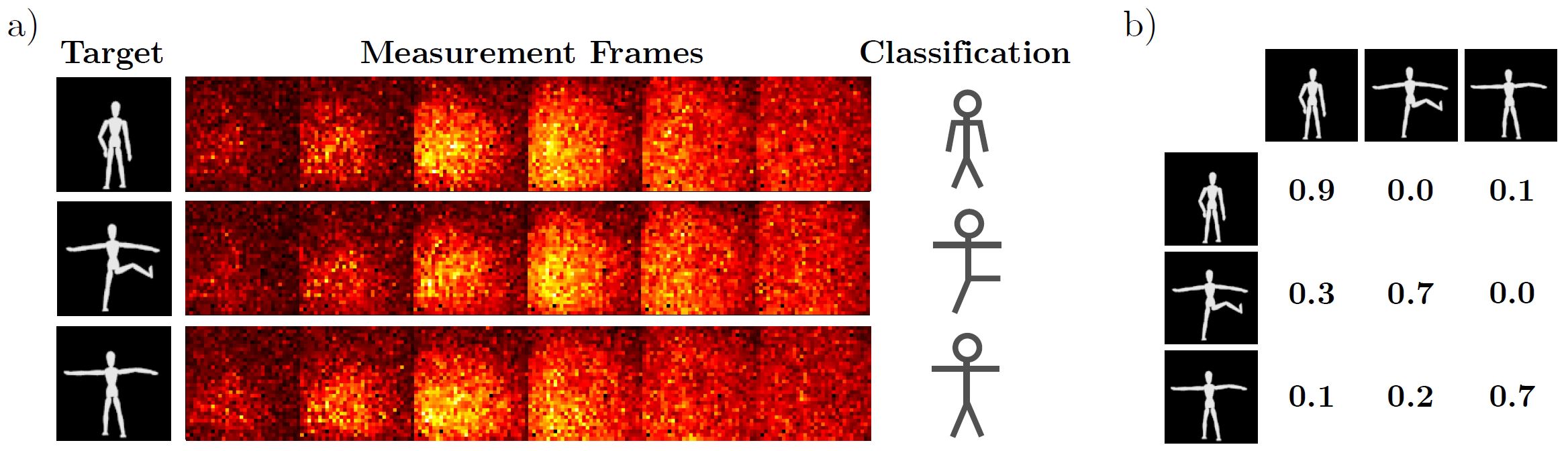
We demonstrate an imaging technique that allows identification and classification of objects hidden behind scattering media and is invariant to changes in calibration parameters within a training range. Traditional techniques to image through scattering solve an inverse problem and are limited by the need to tune a forward model with multiple calibration parameters (like camera field of view, illumination position etc.). Instead of tuning a forward model and directly inverting the optical scattering, we use a data driven approach and leverage convolutional neural networks (CNN) to learn a model that is invariant to calibration parameters variations within the training range and nearly invariant beyond that. This effectively allows robust imaging through scattering conditions that is not sensitive to calibration. The CNN is trained with a large synthetic dataset generated with a Monte Carlo (MC) model that contains random realizations of major calibration parameters. The method is evaluated with a time-resolved camera and multiple experimental results are provided including pose estimation of a mannequin hidden behind a paper sheet with 23 correct classifications out of 30 tests in three poses (76.6% accuracy on real-world measurements). This approach paves the way towards real-time practical non line of sight (NLOS) imaging applications.
The attendant webpage is at: http://web.media.mit.edu/~guysatat/calib_inv/calib_inv.html
 Liked this entry ? subscribe to Nuit Blanche's feed, there's more where that came from. You can also subscribe to Nuit Blanche by Email, explore the Big Picture in Compressive Sensing or the Matrix Factorization Jungle and join the conversations on compressive sensing, advanced matrix factorization and calibration issues on Linkedin.
Liked this entry ? subscribe to Nuit Blanche's feed, there's more where that came from. You can also subscribe to Nuit Blanche by Email, explore the Big Picture in Compressive Sensing or the Matrix Factorization Jungle and join the conversations on compressive sensing, advanced matrix factorization and calibration issues on Linkedin.
No comments:
Post a Comment