
and a view of what a 4 meter or 6 meter flood can do to the Coast and live view of the weather.

Thank you Pedro for the one-week heads-up.
 Talking about Mississippi, LSU is accepting application for the next HASP flight and the deadline is December 18th. The big difference between a HASP flight and that of a sounding balloon can be found here:
Talking about Mississippi, LSU is accepting application for the next HASP flight and the deadline is December 18th. The big difference between a HASP flight and that of a sounding balloon can be found here: A sounding balloon project I am following with much interest is project WARPED. They have an excellent technical description of what they are doing.
A sounding balloon project I am following with much interest is project WARPED. They have an excellent technical description of what they are doing. From the HASP website:
From the HASP website:September 17, 2007: HASP CALL FOR PAYLOADS 2007-2008 RELEASED: The HASP Call for Payloads 2007-2008 (CFP) has been released and application materials are now available on the HASP website “Participant Info” page. Student groups interested in applying for a seat on the September 2008 flight of HASP should download these materials and prepare an application. New for this year is an increase in the allowed weight of the student payloads. Small class payloads can now mass up to 3 kilograms and large class payloads can weigh as heavy as 20 kilograms. Applications are due December 18, 2007 and selections will be announced by mid-January 2008.
 Compared to satellite imagery, one of the interesting capability is to remove the effect of clouds when possible. In satellite imagery, cameras work with pushbroom technology where the imager is a line of pixels (not a square dye). One consequence is the inability of photographing twice the same object with one sweep. Using off the shelf cameras on much slower balloons allow one to obtain multiple images of the same object at different angle. This is important when one wants to evaluate whether the object is noise or not.
Compared to satellite imagery, one of the interesting capability is to remove the effect of clouds when possible. In satellite imagery, cameras work with pushbroom technology where the imager is a line of pixels (not a square dye). One consequence is the inability of photographing twice the same object with one sweep. Using off the shelf cameras on much slower balloons allow one to obtain multiple images of the same object at different angle. This is important when one wants to evaluate whether the object is noise or not.
 Day 2.6
Day 2.6 Day 4.8
Day 4.8 Day 5.1
Day 5.1






 and devastate the U.S. eastern sea shore, part of Europe, South America and Africa.
and devastate the U.S. eastern sea shore, part of Europe, South America and Africa. 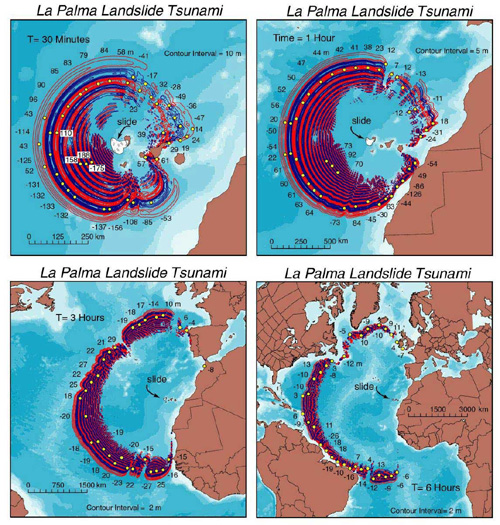

{kind=link}