Robust Compressed Sensing and Sparse Coding with the Difference Map by Will Landecker, Rick Chartrand, Simon DeDeo
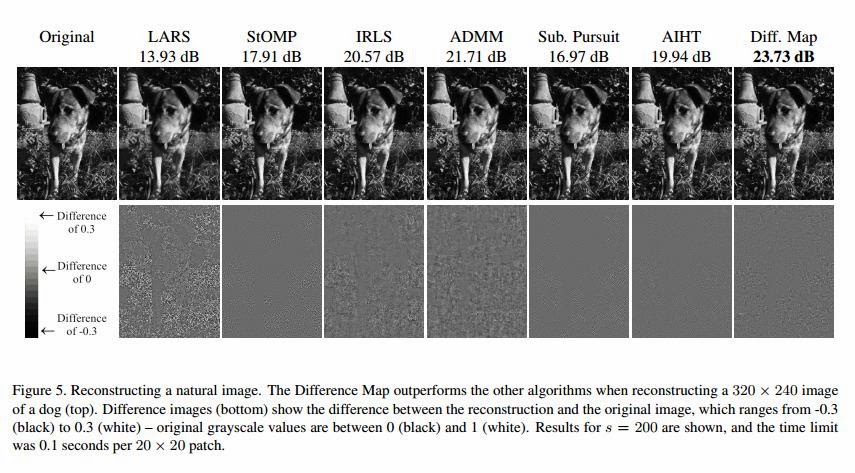
In compressed sensing, we wish to reconstruct a sparse signal $x$ from observed data $y$. In sparse coding, on the other hand, we wish to find a representation of an observed signal $y$ as a sparse linear combination, with coefficients $x$, of elements from an overcomplete dictionary. While many algorithms are competitive at both problems when $x$ is very sparse, it can be challenging to recover $x$ when it is less sparse. We present the Difference Map, which excels at sparse recovery when sparseness is lower and noise is higher. The Difference Map out-performs the state of the art with reconstruction from random measurements and natural image reconstruction via sparse coding.
The attendant implementation is here in the supplementary section of the preprint.
 Liked this entry ? subscribe to Nuit Blanche's feed, there's more where that came from. You can also subscribe to Nuit Blanche by Email, explore the Big Picture in Compressive Sensing or the Matrix Factorization Jungle and join the conversations on compressive sensing, advanced matrix factorization and calibration issues on Linkedin.
Liked this entry ? subscribe to Nuit Blanche's feed, there's more where that came from. You can also subscribe to Nuit Blanche by Email, explore the Big Picture in Compressive Sensing or the Matrix Factorization Jungle and join the conversations on compressive sensing, advanced matrix factorization and calibration issues on Linkedin.
No comments:
Post a Comment