Achuta Kadambi just let me know of a different ToF camera than the UBC effort featured in the previous blog entry: the project page is here; wow.

This is really anoter interesting hardware implementation: Coded Time of Flight Cameras: Sparse Deconvolution to Address Multipath Interference and Recover Time Profiles by Achuta Kadambi, Refael Whyte, Ayush Bhandari, Lee Streeter, Christopher Barsi, Adrian Dorrington, Ramesh Raskar
Time of flight cameras produce real-time range maps at a relatively low cost using continuous wave amplitude modulation and demodulation. However, they are geared to measure range (or phase) for a single reflected bounce of light and suffer from systematic errors due to multipath interference.We re-purpose the conventional time of flight device for a new goal: to recover per-pixel sparse time profiles expressed as a sequence of impulses. With this modification, we show that we can not only address multipath interference but also enable new applications such as recovering depth of near-transparent surfaces, looking through diffusers and creating time-profile movies of sweeping light.Our key idea is to formulate the forward amplitude modulated light propagation as a convolution with custom codes, record samples by introducing a simple sequence of electronic time delays, and perform sparse deconvolution to recover sequences of Diracs that correspond to multipath returns. Applications to computer vision include ranging of near-transparent objects and subsurface imaging through diffusers. Our low cost prototype may lead to new insights regarding forward and inverse problems in light transport.
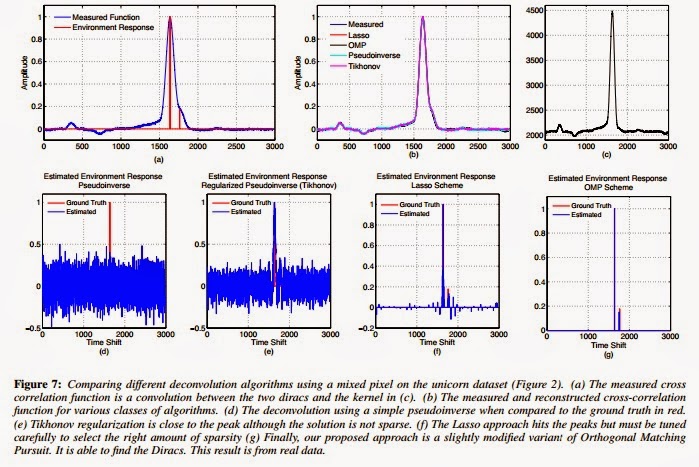
I note the good performance of the greedy solver.
I also note the very interesting item in the project page
Reproducible Experiments
Newer components are available to build an improved version of the prototype detailed in a paper. It is also cheaper due to the reduced cost of components in today's market. Please contact us if you would like to build the nanophotography setup.
Contact
For technical details contact: Achuta Kadambi: achoo@mit.edu
 Liked this entry ? subscribe to Nuit Blanche's feed, there's more where that came from. You can also subscribe to Nuit Blanche by Email, explore the Big Picture in Compressive Sensing or the Matrix Factorization Jungle and join the conversations on compressive sensing, advanced matrix factorization and calibration issues on Linkedin.
Liked this entry ? subscribe to Nuit Blanche's feed, there's more where that came from. You can also subscribe to Nuit Blanche by Email, explore the Big Picture in Compressive Sensing or the Matrix Factorization Jungle and join the conversations on compressive sensing, advanced matrix factorization and calibration issues on Linkedin.
No comments:
Post a Comment